2026.3.21 晨
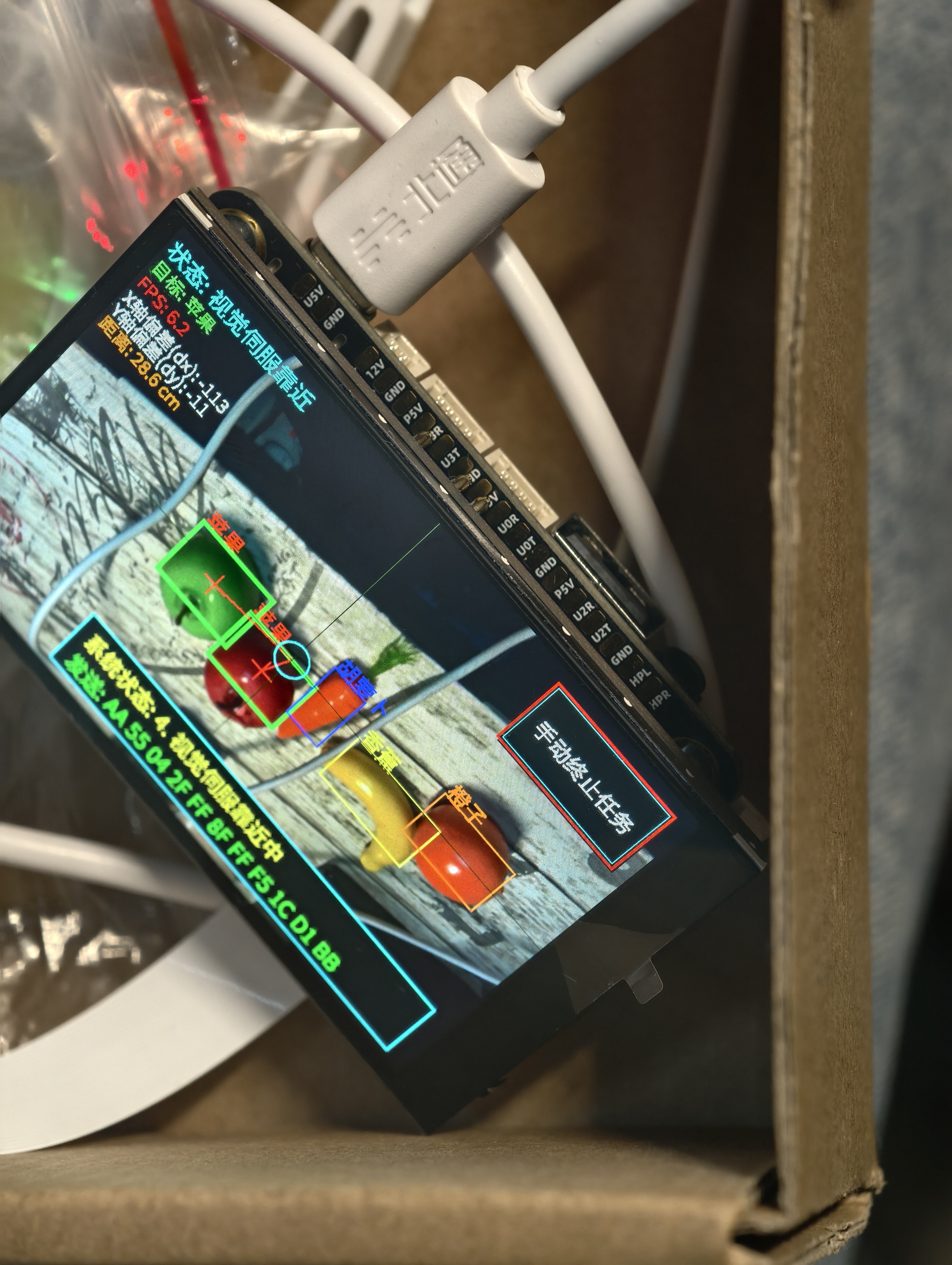
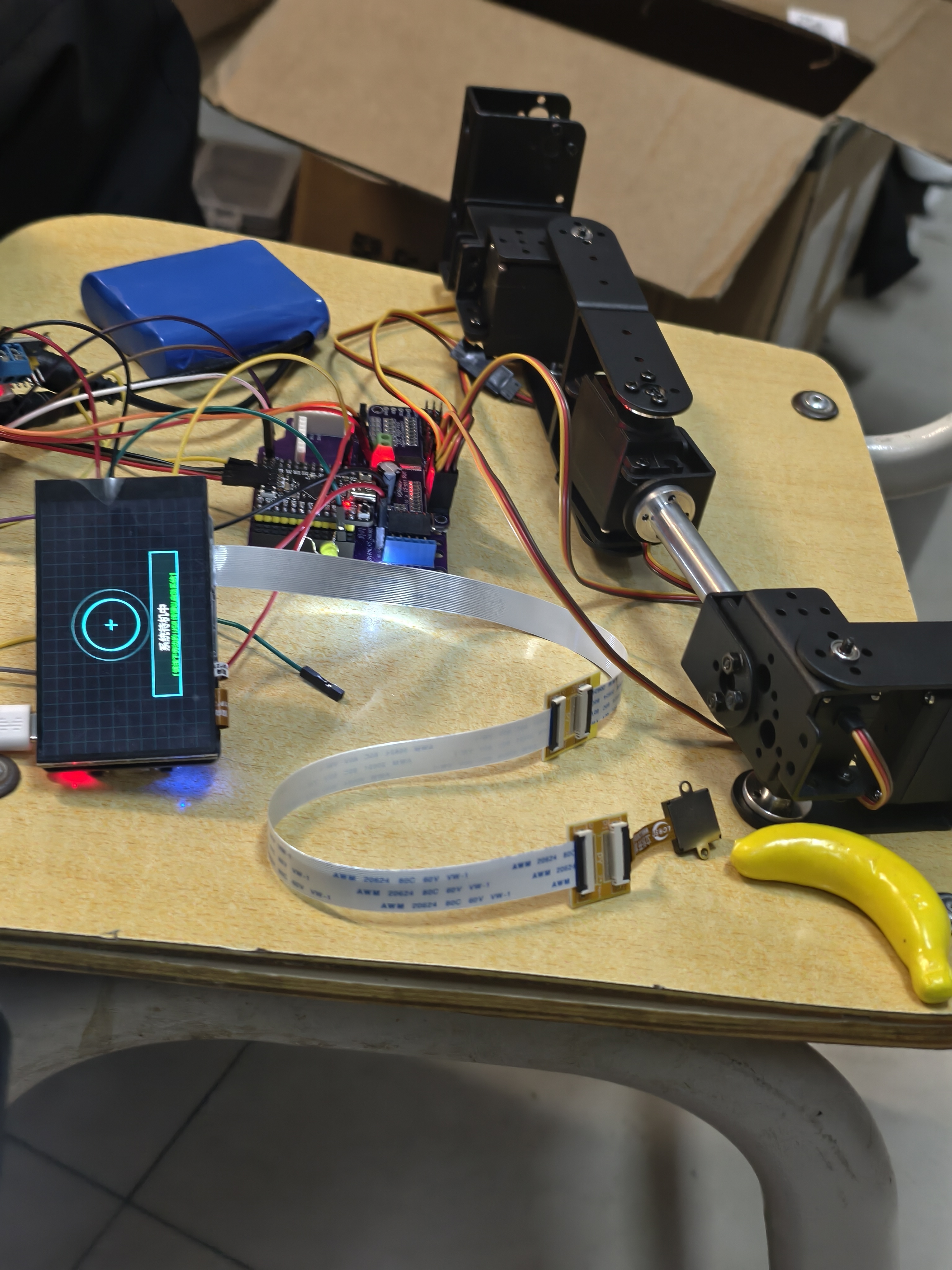
项目在上学期就已经开始了,起源是参加电赛然后我负责视觉组。于是选择了k230庐山派这块性价比很高的视觉ai板子,主要在上面跑yolov8n模型,然后进行水果识别。现在应该算是进展比较顺利,已经能够顺利并上机械臂了,接下来就是对机械臂的微调和底盘了,感觉还是挺有希望的哈哈哈。
项目在上学期就已经开始了,起源是参加电赛然后我负责视觉组。于是选择了k230庐山派这块性价比很高的视觉ai板子,主要在上面跑yolov8n模型,然后进行水果识别。现在应该算是进展比较顺利,已经能够顺利并上机械臂了,接下来就是对机械臂的微调和底盘了,感觉还是挺有希望的哈哈哈。
大象席地而坐……
大象席地而坐二阶段……

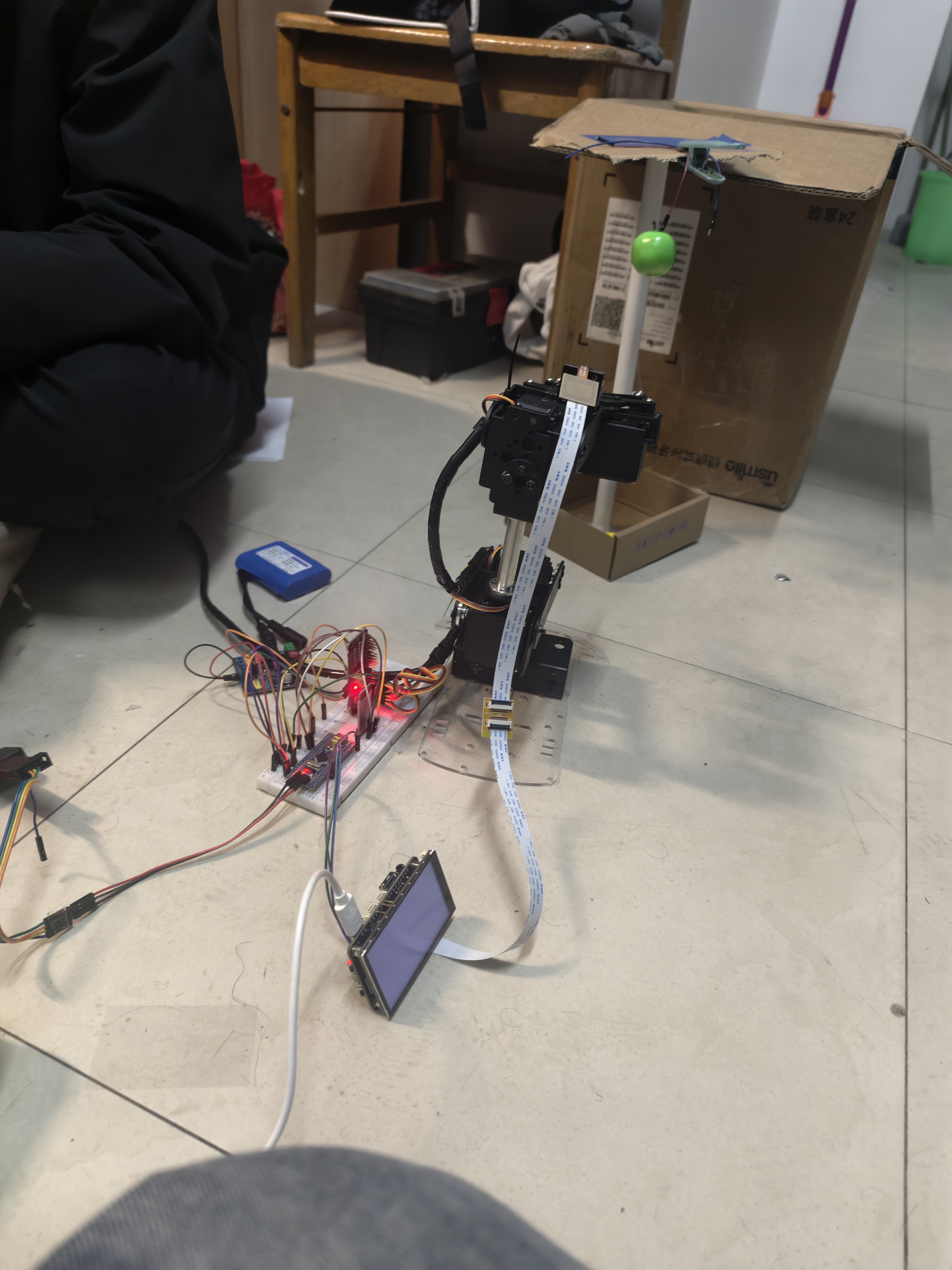
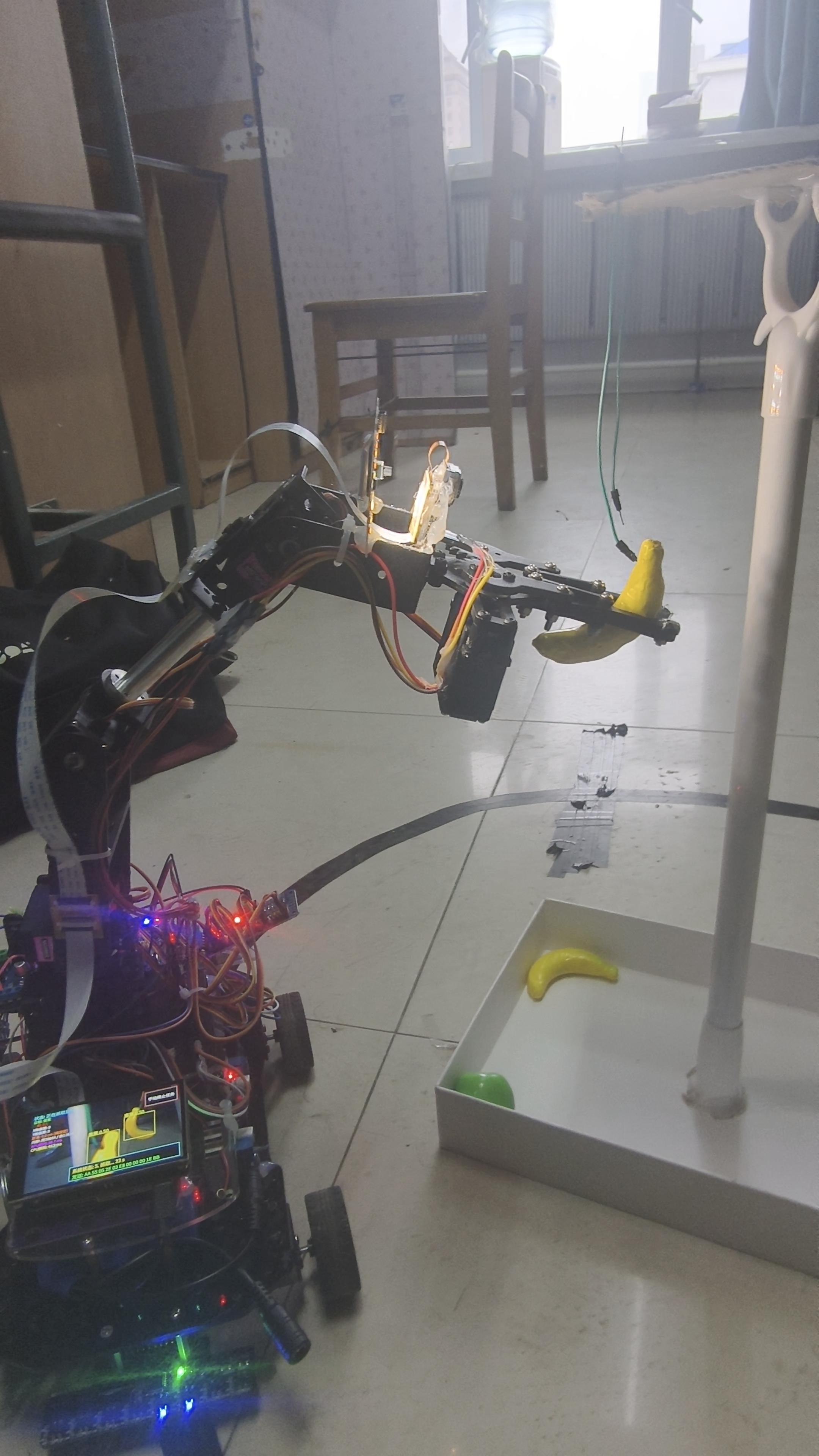
今天进展出乎意料,竟然真的准确的夹到了但是还是有很多bug……
烧了一个摄像头……
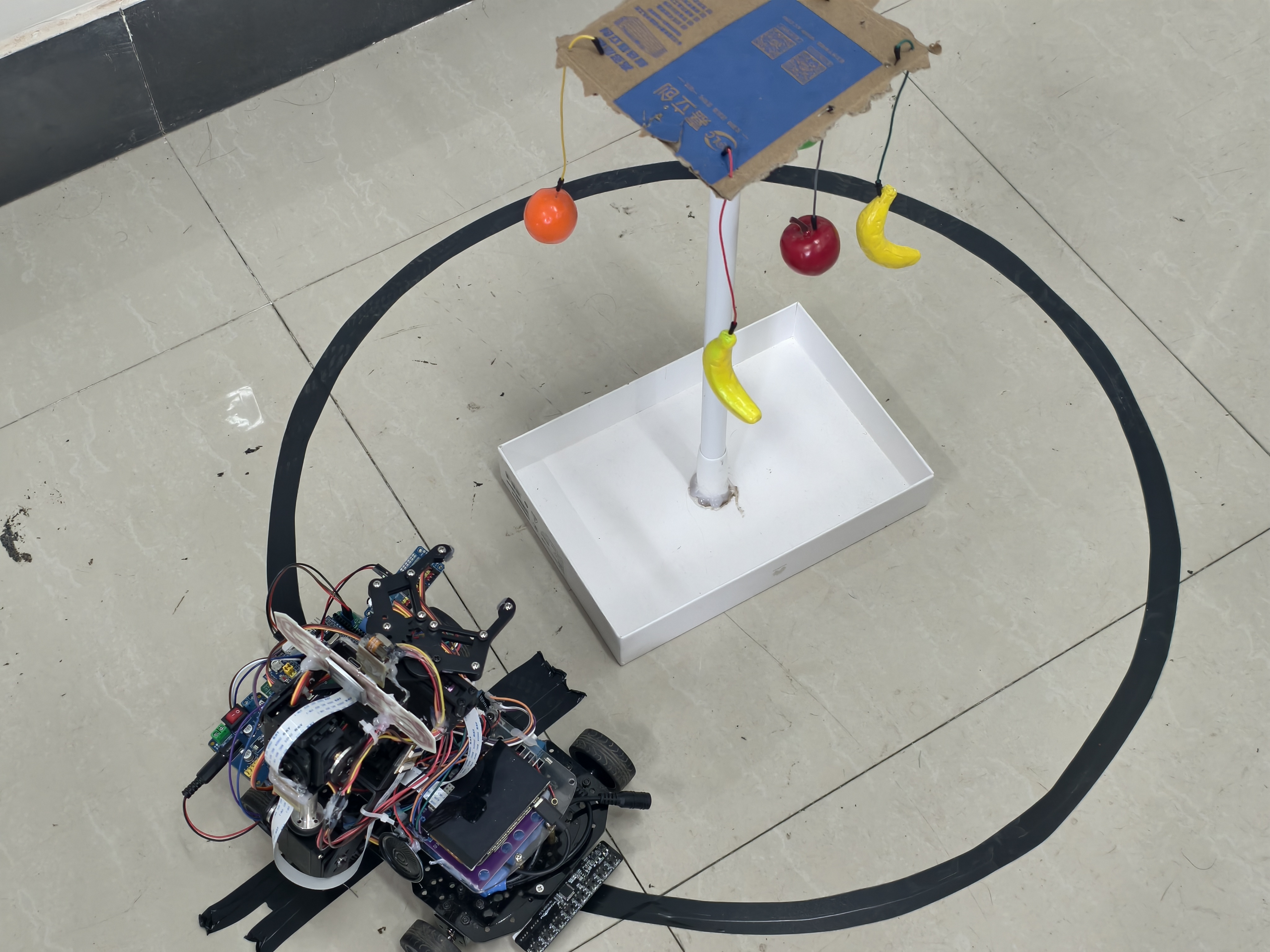
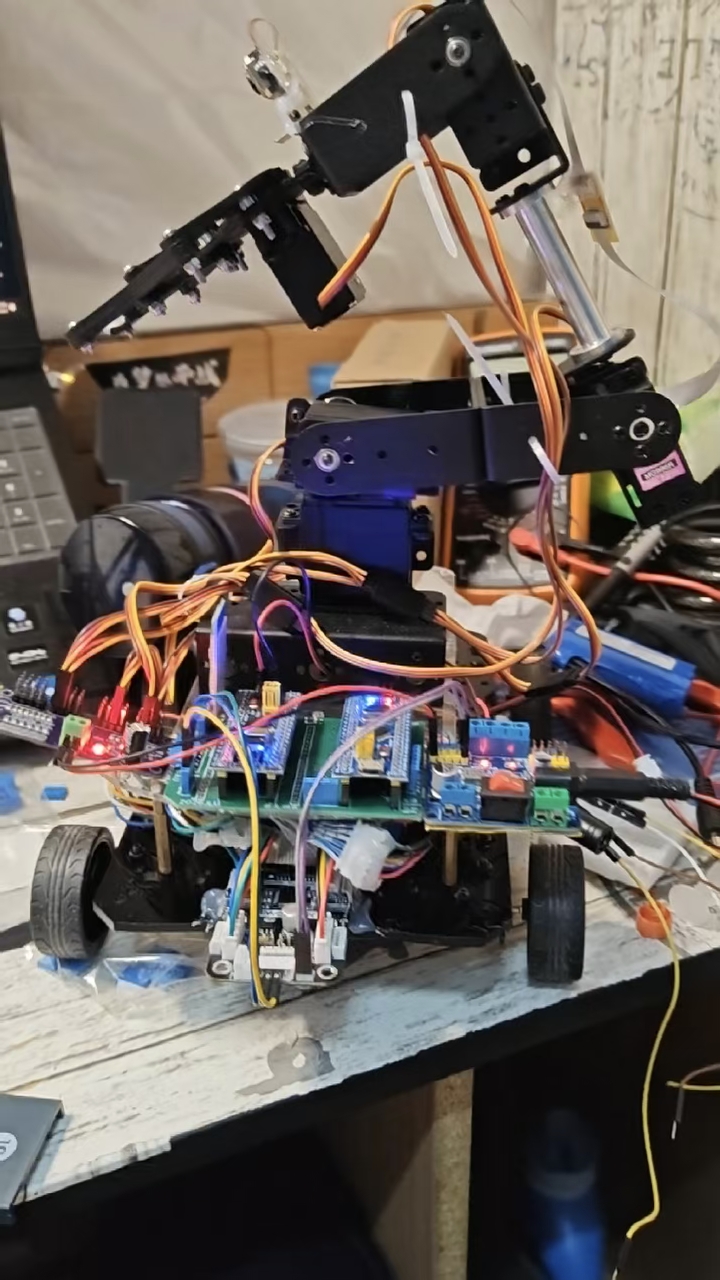
哈哈哈好久没更新进度了,只能大概放几张图了。对了,又弄断了一个摄像头……现在只剩下那个数码变焦的了……
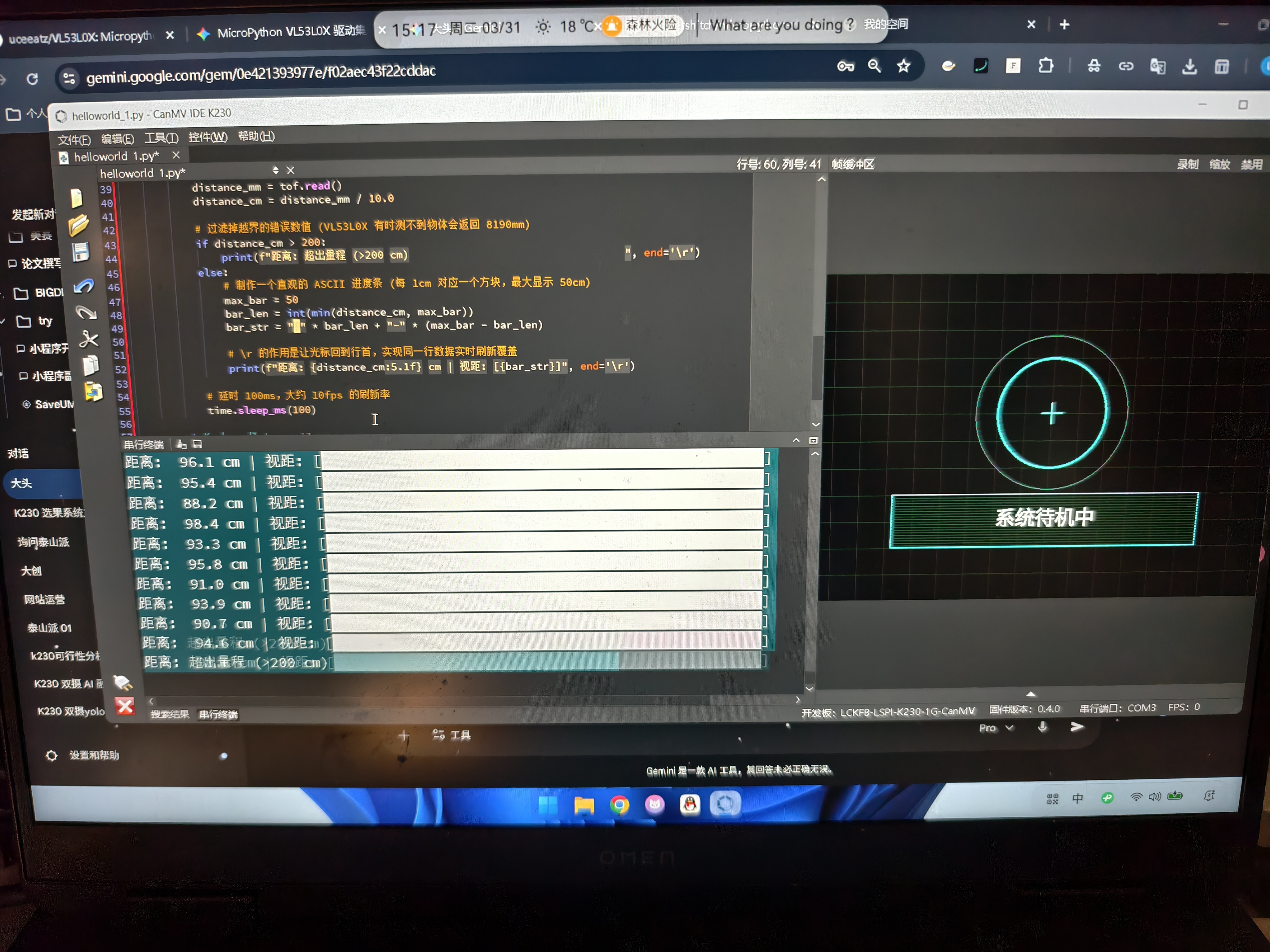
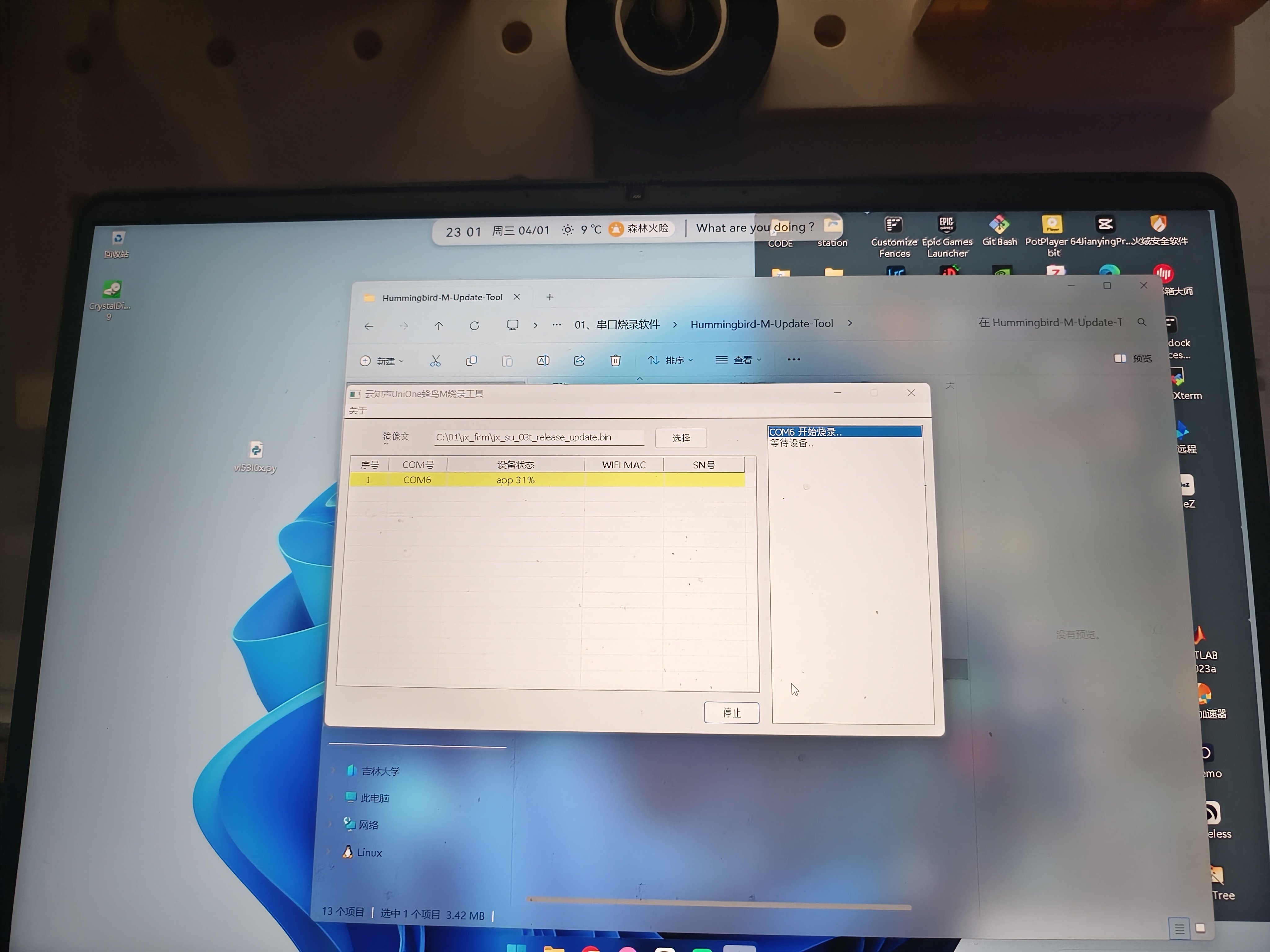
成功加入激光测距和语音模块。su03t的烧录简直就是一坨……

懒。依旧拖了很久才更新进度
对胶哥进行了进一步的调试和优化,它还被学长夸了哈哈哈。而且真的是非常开心非常有成就感的一晚,感觉我的报告做得超级无敌好,希望胶哥明天能够顺利。好
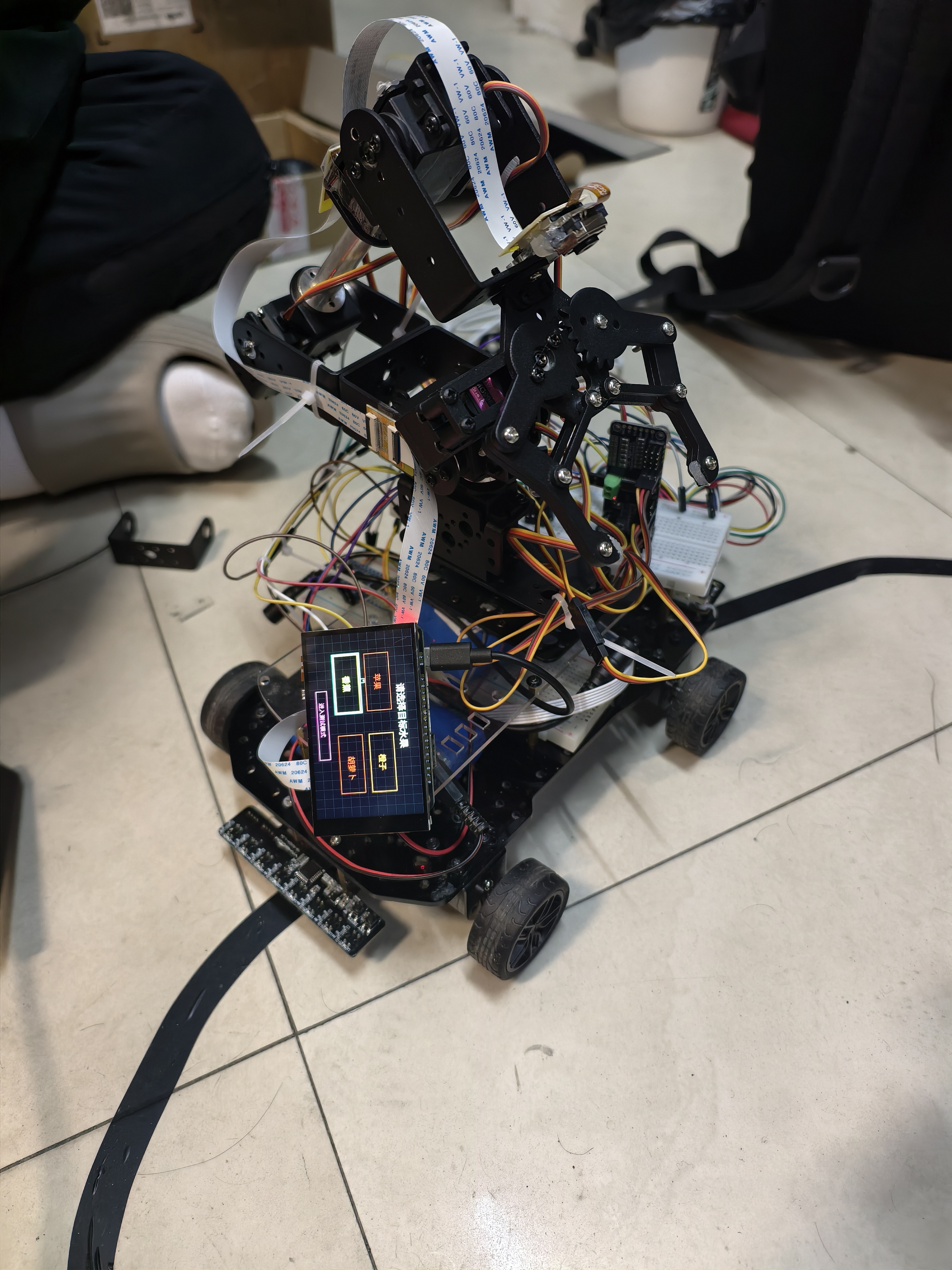
好一个女儿出嫁哈哈哈。真是一个具有历史性意义的时刻。

成功通过院赛,感觉过校赛的概率还是很大的。胶哥需要优化改进的地方也还有很多很多了
虽然没有前一天调试的时候那么流畅丝滑但是也还算是有惊无险吧

胶哥帅照二张

终于打完校赛了,真的是无比惊险无比独特的一次体验,真是不得不采取倒叙了
在比赛前一天中午调试的时候,也就是17号下午,发现原装的mipi摄像头排线似乎坏了
这个是立创的自己的设计的闭源摄像头然后在学校里根本没有适配的,整个人直接就炸了
到处找摄像头到处借,最后去了714碰碰运气,真的压力拉满了……

真的特别感谢一个学长,借了一个usb摄像头

但是又问ai,又查资料发现貌似usb摄像头连接k230只能通过ros,这样就要要c或者linux了
当时觉得可能不太行,然后就搞编译系统啥的啥的,总之就是失败了,当时感觉这条路肯定走不通,压力拉满……
队友说去外面开个房调试,真的是第一次夜不归寝哈哈哈哈


一直在吃速溶咖啡粉哈哈哈
我肝了个完完全全的纯激光识别方案然后队友把esp32也尝试了。我们一直在说十年以后,我们大概也都会记得这两天。
也急得顾不上记录了,总之识别效果还挺差然后本来准备好把一切都计划好的就这样上了。现在想来估计会被老师拷打至死吧哈哈哈哈
不知不觉就又通宵了,记得五点多就天亮了,天空很美,还是个粉调时间。
很早就到场地了,当时也就不报啥希望,就是准备跑那个激光方案了

哈哈哈记得在去场地的途中还说,本来应该是比赛前一天晚上好好地悠哉悠哉调试好参数然后上场,比完之后无论结果如何都能够开开心心地回南岭去看看下午的杏花节,结果现在变成这样了……
谁知道真的就实现了!!!
起因是我想问一下Claude能不能用usb实现,命运的齿轮开始转动……

真就是在比赛前两个小时搞成功了,真的无敌了……
虽然性能真的不太行,usb摄像头的反应太慢了,延迟很大,但是起码真的能跑,然后也是在一直调参
最后比赛的时候真的成功了,基本上就比之前的效果差了一点点。真的也能够接受,更加可贵的是我们的这个经历哈哈哈,真的是有够传奇的!
比完赛记录下的调试胶哥的遗迹哈哈哈

人生真的很奇妙,先前用到的一些东西真的莫名其妙就会联系在一个交汇点。不要放弃,机会也真的是留给有准备的人。
真的还好去借了一个usb摄像头,真的很感谢所有人的帮助,antigravity牛逼1!胶哥牛逼!永远的你先别吉哈哈哈哈!
其实到现在大概就是这个项目的结局了,不论校赛结果如何,这真是个完美结局。